



Flugleistungsvermessung
Das Photoverfahren ist ein gut bewährtes Verfahren im Bereich der Flugleistungsvermessung. Bisher war es jedoch immer mit einem sehr großen Aufwand und mit zufälligen Fehlern verbunden, die durch den Auszuwertenden entstanden sind. Im Folgenden soll eine automatisierte Lösung vorgestellt werden, welche die genannten Problem löst. Zielstellung ist, ein auf MATLAB basierendes Programm mit graphischer Oberfläche zu schaffen, das jeder Nutzer bedienen kann. Als Daten fungieren die im Flug aufgenommenen Fotos des Referenzflugzeuges und des zu vermessenden Flugzeuges.
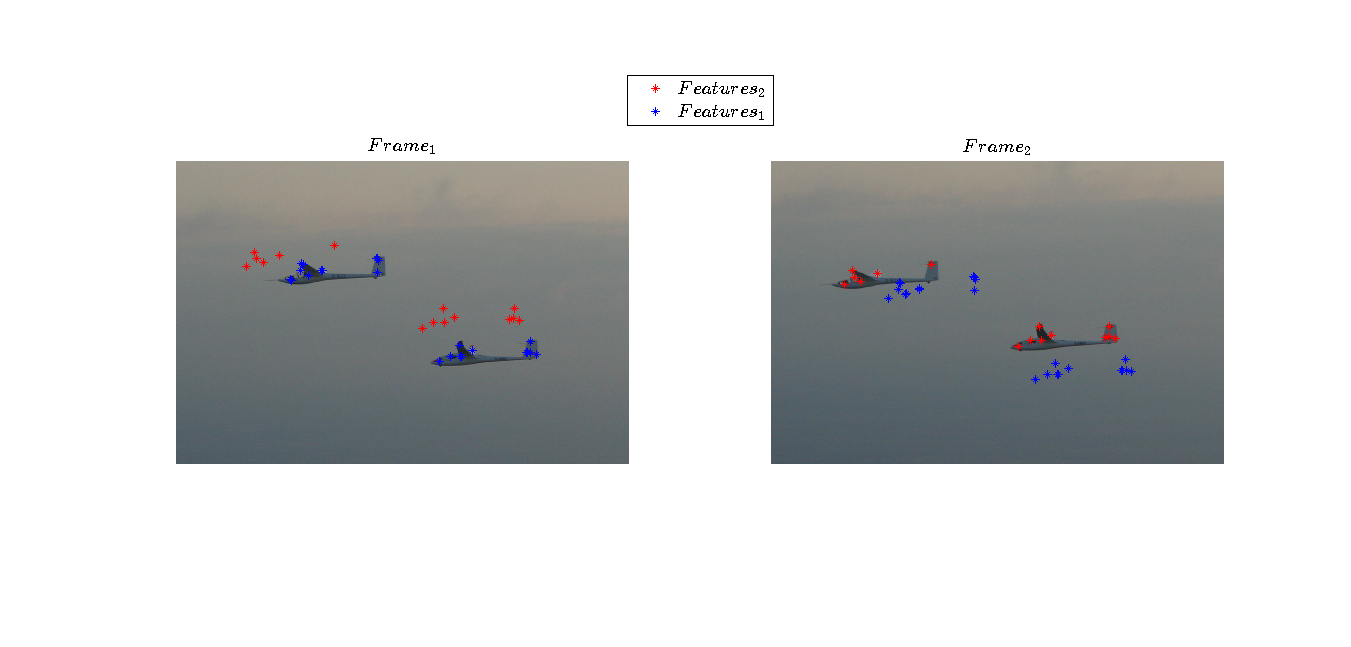
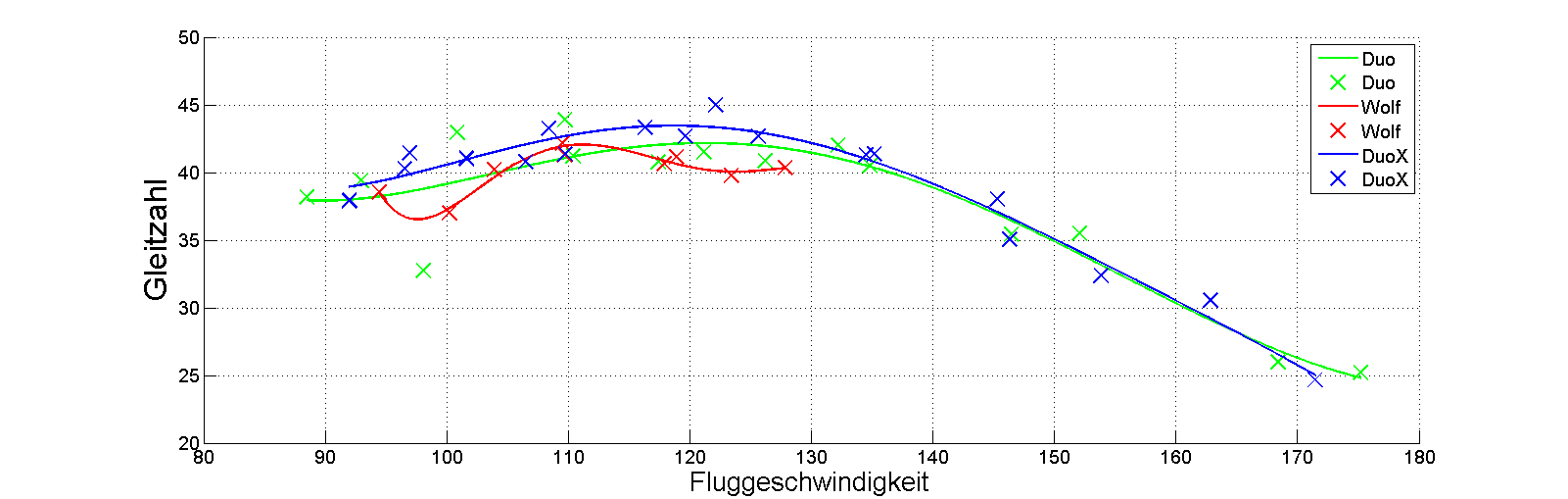
Auf dem Sommertreffen 2014 wurde der erste Schritt, nämlich der Umstieg von der Auswertung mittels mechanischer Fadenkreuze auf die Ermittlung der Referenzpunkte und die Berechnung der Höhenunterschiede der Flugzeuge in einer grafischen Benutzeroberfläche in Matlab realisiert. Hier werden alle zur Berechnung notwendigen Punkte wie Horizontlinie, Nase und Seitenruderecke durch das Klicken mit der Maus auf die Objekte markiert. Mit diesen Bildkoordinaten kann zusammen mit der bekannten realen Rumpflänge der Maßstab der Flugzeuge, und somit der Höhenunterschied berechnet werden. Diese Informationen werden für jedes Foto zusammen mit der genauen Uhrzeit der Aufnahme abgespeichert. Anhand des Messprotokolls über die Flugzeugkonfiguration, des Beginns und des Endes der Messabschnitte werden die Informationen aus den Bildern sortiert. Die Dauer eines Messabschnittes wird dabei automatisch aus dem ersten und letzten Bild ermittelt. Des Weiteren wurden die von einer Messanlage aufgezeichneten Flugdaten ausgewertet. Aus diesen Daten wurden Fluggeschwindigkeit, Höhe, Temperatur Uhrzeit und GPS Position gespeichert und in Standardeinheiten überführt. Mit den Informationen über die Fluggeschwindigkeit des Referenzflugzeuges kann der Höhenverlust mittels der Geschwindigkeitspolare über den Messabschnitt evaluiert werden. Zusammen mit dem gemittelten Höhenunterschied zu Beginn und am Ende des Messabschnittes wird der gesamte Höhenverlust über die geflogene Wegstrecke, und somit die Gleitzahl des zu vermessenden Flugzeuges ermittelt. Schlussendlich werden die Ergebnisse in einem Geschwindigkeitsdiagramm aufgetragen und, über ein Polynom gemittelt, zu einer Polare zusammengefasst. Das Ergebnis ist in der Abbildung 1 dargestellt. Bis hierhin ist das Programm halbautomatisch funktionsfähig. In dieser Konfiguration kann jedoch immer noch ein nicht wiederhohlbarer Fehler beim manuellen Markieren der Flugzeuge auftreten. Eine noch elegantere Lösung für das Gesamtkonzept liegt demnach in der Vollautomatisierung des Vorgangs. Hierbei werden Bildverarbeitungsalgorithmen auf die Fotos angewendet, um Referenzpositionen in den Bildern zu finden. Diese sind Punkte, wie sie beispielhaft in der Abbildung 2 für zwei aufeinanderfolgende Bilder zu finden sind. Diese Punkte sind charakteristisch, können in beiden Bildern gefunden und einander zugeordnet werden. Danach ist es möglich die optimale Transformationsmatrix iterativ zwischen zwei Bildern zu finden. Sie beschreibt die Bewegung der Punktewolke von dem einen zum anderen Bild und beinhaltet aus diesem Grund alle für die Berechnung notwendigen geometrischen Informationen¬. Der Prozess ist zum größten Teil schon implementiert, bedarf aber beim nächsten Sommertreffen noch einer Verifizierung.
Text: Philip Döring & Nicolai Adelhoefer